I buyed my cats this toy that drives around with a laserpointer on top. It was a banger on first sight so I decided to add a remote controlling ESP-32 that can be reached over HTTP to control it. I built a simpe web page with a button to start and stop it.

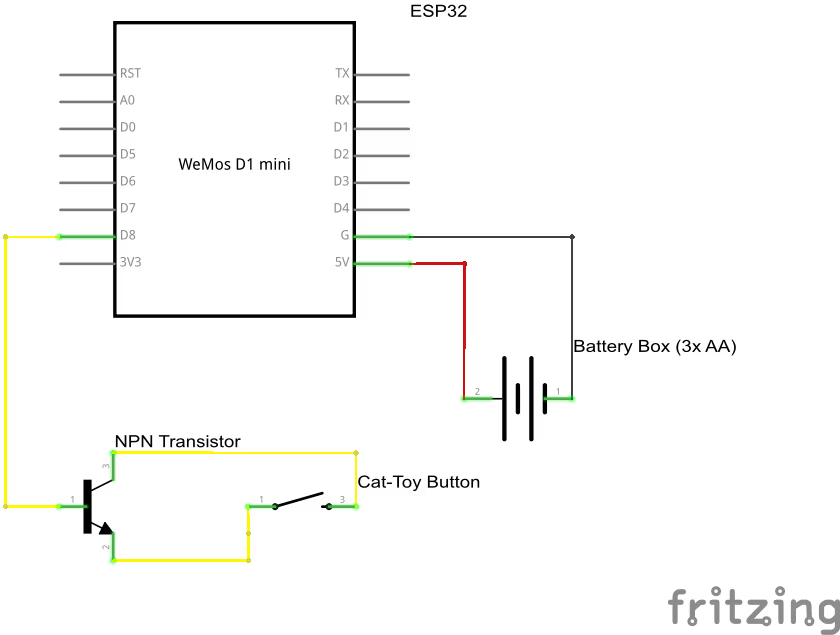
Wiring diagram:
Arduino source code for this:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
| #include <WiFi.h>
#include <ESPAsyncWebSrv.h>
constexpr int GPIO_TOY_TOGGLE = 32;
static const char* ssid = "...";
static const char* password = "...";
static const char* mainPageContent = R"__(<!DOCTYPE html>
<html>
<head>
<meta name="viewport" content="width=device-width, initial-scale=1.0, user-scalable=no">
<title>Cat Toy Control</title>
<style>
html { font-family: Arial; display: inline-block; margin: 0px auto; text-align: center; }
body { margin-top: 50px; }
h1 { color: #444444; margin: 50px auto 30px; }
.button {
display: block; width: 160px; background-color: #34495e; border: none; color: white;
padding: 13px 30px; text-decoration: none; font-size: 25px; margin: 0px auto 35px;
cursor: pointer; border-radius: 4px;
}
.button:active { background-color: #2c3e50; }
</style>
</head>
<body>
<h1>Cat Toy Controller</h1>
<a class="button" href="/toggle">Start/Stop</a>
</body>
</html>)__";
static AsyncWebServer server(80);
void setup() {
pinMode(GPIO_TOY_TOGGLE, OUTPUT);
digitalWrite(GPIO_TOY_TOGGLE, LOW);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
}
// power saving
WiFi.setSleep(true);
setCpuFrequencyMhz(10);
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request) {
request->send(200, "text/html", mainPageContent);
});
server.on("/toggle", HTTP_GET, [](AsyncWebServerRequest *request) {
digitalWrite(GPIO_TOY_TOGGLE, HIGH);
delay(100);
digitalWrite(GPIO_TOY_TOGGLE, LOW);
request->redirect("/");
});
server.begin();
}
void loop() {
delay(1);
}
|
